ゴルフスイング
Luke
飛距離アップに「体重移動」は本当に必要か?その3
こんにちは、ライターのLukeです。
前回のその2に引き続き、体重移動を積極的に行うよりも、体重移動を抑えたほうが、ゴルフは簡単になり、なおかつ飛距離と精度を向上させる効果があることを説明します。
ゴルフロボットがスイングのお手本だった!?
まずはこの動画をご覧ください。
このゴルフロボットのスイング、とてもシンプルで、簡単にスイングしているように見えませんか?
体重移動のパワーではなく、クラブの遠心力で飛ばすスイングです。
ゴルフクラブやシャフトのメーカーは、このようなゴルフロボットで製品を開発しているので、現代のクラブはこのようにスイングすれば、クラブの性能を最大限に発揮することができるはずですね。
このゴルフロボットのスイングを人間で再現しようとすると、次の7点が必要になります。
1.グリップをある程度「しっかり」と握って、少しハンドアップに構える。
2.左右にスイング軸を動かさないように、体重移動を抑える。
3.下半身の回転に遅れないように、ダウンスイングを開始する。
4.ダウンスイングでタメを作らないように、早いタイミングからクラブを回転させる。
5.アームローテーションを意識しないで、自然に腕を振る。
6.ハンドファーストにならないように、スタンス(身体)の中央でインパクトする。
7.フォローで加速させるのではなく、ダウンスイングからスピードを上げる。
このようなスイングイメージになりますが、皆さんお気付きでしょうか?
実はこの7点、多くのゴルフレッスンの内容とは真逆とも言えるものなのですが、このような動きを意識しないとゴルフロボットのようなスイングにはなりません。
そして『ゴルフロボット打法』とも呼べるこのスイング、実際に試してみると、とても簡単なスイングで、誰にでも飛距離と精度のアップに効果抜群だったのです。
アドレスでボールが真ん中にくるように構えたら、あとはその場で「クルッ」とクラブを回転させるだけ。
こんなイメージでOKなのです。
気付けば世界のゴルフも変化していました。
前回のその2で紹介した松山英樹選手だけでなく、世界のトップクラスの選手達も、無駄な動きが少ない、ゴルフロボットのようなスイングをする選手が増えてきました。
現代のゴルフクラブとボールの性能なら、それで十分であり、そのほうが性能を引き出せるのです。
体重移動のスイングは難しい!
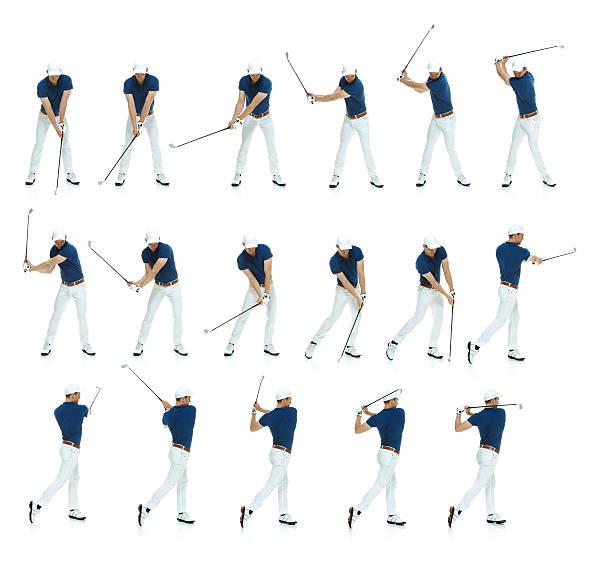
体重移動を積極的に行うスイングは、この連続写真のようなイメージになります。
左足を踏み込んでダウンスイングを開始して、腰が左に移動しながらインパクト。
この時に腰の位置は、アドレスよりも20~30センチも左に流れるように移動しています。
身体が作るスイング軸はボールに対して「くの字」になり(正面から見ると「逆くの字」)、インパクトのグリップ位置も腰につられるように左に流れているので、必ずハンドファーストになります。
そしてこのスイングでは、ダウンスイングで自然にクラブに「タメ」ができる代わりに、フェース面が開いて振り遅れの状態になりやすく、アームローテーションをしないとインパクトに間に合わなくなり、そのためにアームローテーションをすることで、フォローで加速するようなイメージになります。
つまり……体重移動を積極的に行うスイングには、ダウンスイングのタメ、アームローテーション、ハンドファーストのインパクト、フォローの加速、というスイング項目が必然的にセットされることになるのです。
そしてさらに一般的なゴルフレッスンでは、下半身リードという項目も加えられることになるので、全体で非常に複雑な動き方を要求されることになります。
左右へ動く量やタイミング、手首や肘の細かい動きなどを、日々調整が必要になるので、少ない練習量ではなかなか上達できないのは仕方ありませんね。
もっと簡単なスイングにトライしてみましょう!

松山英樹選手のように体重移動を抑えて、下半身を先行させないように意識すれば、ゴルフロボットのようなシンプルなスイングになり、インパクトのタイミングを合わせやすく、飛距離と精度も向上します。
体重移動を積極的に行うスイングよりも、確実にゴルフが簡単になります。
現在の日本のゴルフレッスンでは、体重移動と下半身リードを推奨しているレッスン内容が主流になっていますが、もしその内容に難しさを感じているのなら、「ゴルフロボット打法」にトライしてみてはいかがでしょうか?
関連記事